General Design
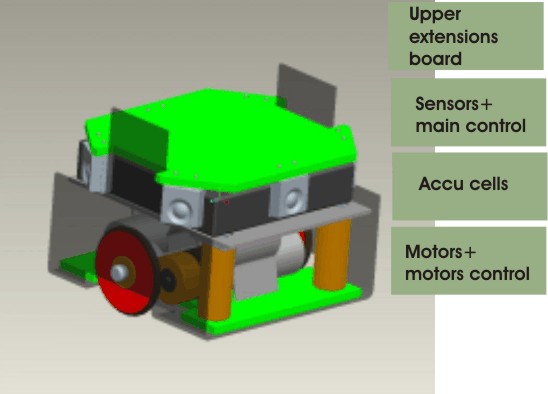
General design of the micro-robot is often limited by the size and geometrical configurations of used components. Since we would like to have a robot that is small as possible, but still cheap and easy in assembling, the most efficient construction principle in this case is either a whole integration of all components on one PCB (flexible PCB) or a "sandwich design". Analysing sensors for sensing and communication we come at a conclusion that SMD sensors are not really suitable (who can find such a sensors with reflexion distance about 10-15 cm please write a replay). Thus an integration of all components into one PCB is not possible and so only "sendwith design" can be used. In the figure below we show one of first propotypes.
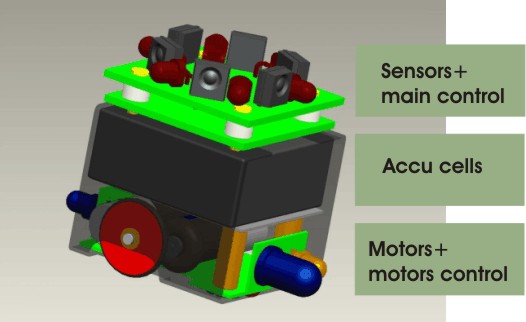
Order of "sandwich layers" is defined by the size of accu: accu can be placed only between motor PCB and sensors board. All layers of this "sandwich" can be covered by a thin plastic or, more sophisticated, by metal chassis. This design is simple for assembling, cheap and protect electronics and mechanics from possible damages. This construction is not changed in the next prototypes, where extentions boards are threaded on the main board.